Auto-tuning of a PID controller
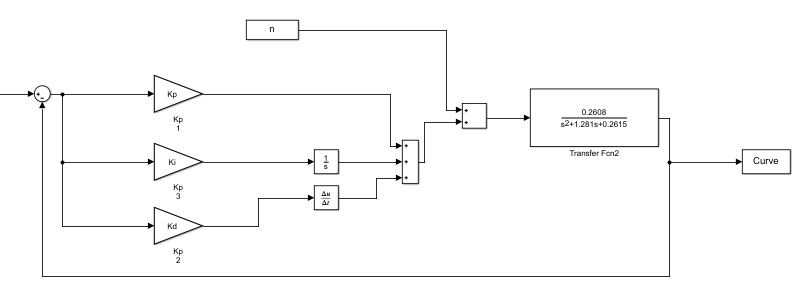
A proportional-integral-derivative controller (PID), is a system that allows to regulate the error of a result by means of feedback, with the objective of assimilating a reference value. The PID control consists of three parameters that define its behavior: the proportional value (Kp), the integral value (Ki) and the derivative value (Kd), coexisting as:
Problematic
To exploit the performance of a PID controller, we will explore the results obtained when self tuned and modeled as a stochastic sequential decision problem.
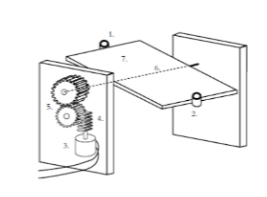
In Fig.1, we identify a system that needs to control its position, this system was analysed and roughly approximated to the following transfer function: Gc = 0.2608/(s2 + 1.281s + 0.2615) this approximation is useful for simulations. Now, we can naively simulate the control of the system and stimulate it to obtain its reactions, the software used for this was Simulink from Matlab.
Solution
To solve, we will use a rollout algorithm. The states xk are composed by the gains Ki, Kp and Kd, and the curve resulting from their simulation. We can also define the system by its reference signal Va, and a general terminal cost approximation (Tapprox) denoted by:
Our function to minimize is the expected value of the difference between the simulated curve and Va at every state k (Gdiff), seen as follows:
The control process will be defined by increasing one of this gains by a step whose distribution is denoted by U (0, 10). A second gain will be increased following a look-ahead policy, meaning that a mixure of two of the gains behavior of Gdiff will be analyzed, as seen in:
The Gdiff will be a value constantly compared to find its optimal magnitude, if it’s a minimum value, we approve the path of gain increment so far, if Gdiff didn’t improve, that gain increment will be discarded, being uk and xk+1 = f (xk, uk) defined.
Algorithm 1: Approximate method
Result: Gdiff, Ki, Kp, Kd
Ki, Kp, Kd, Va, Tapprox;
While Tapprox > Gdiff do
Increment gains sequentially, simulate and obtain Gdiffk;
if Gdiffk < min(Gdif f ) then
Update gains
else
Discard gains
end
end
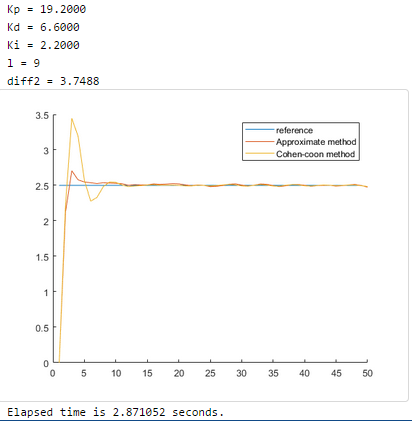
Results
This program takes an average of 5.56 seconds to find results for the PID controller. This is due to the fact that it needs more simulations for the look-ahead method. In the Fig. 3 we can see the results of one of the experiences. Here we note a better performance than the classic method of Cohen-coon.